





Watson-AGVS小車中央調度系統
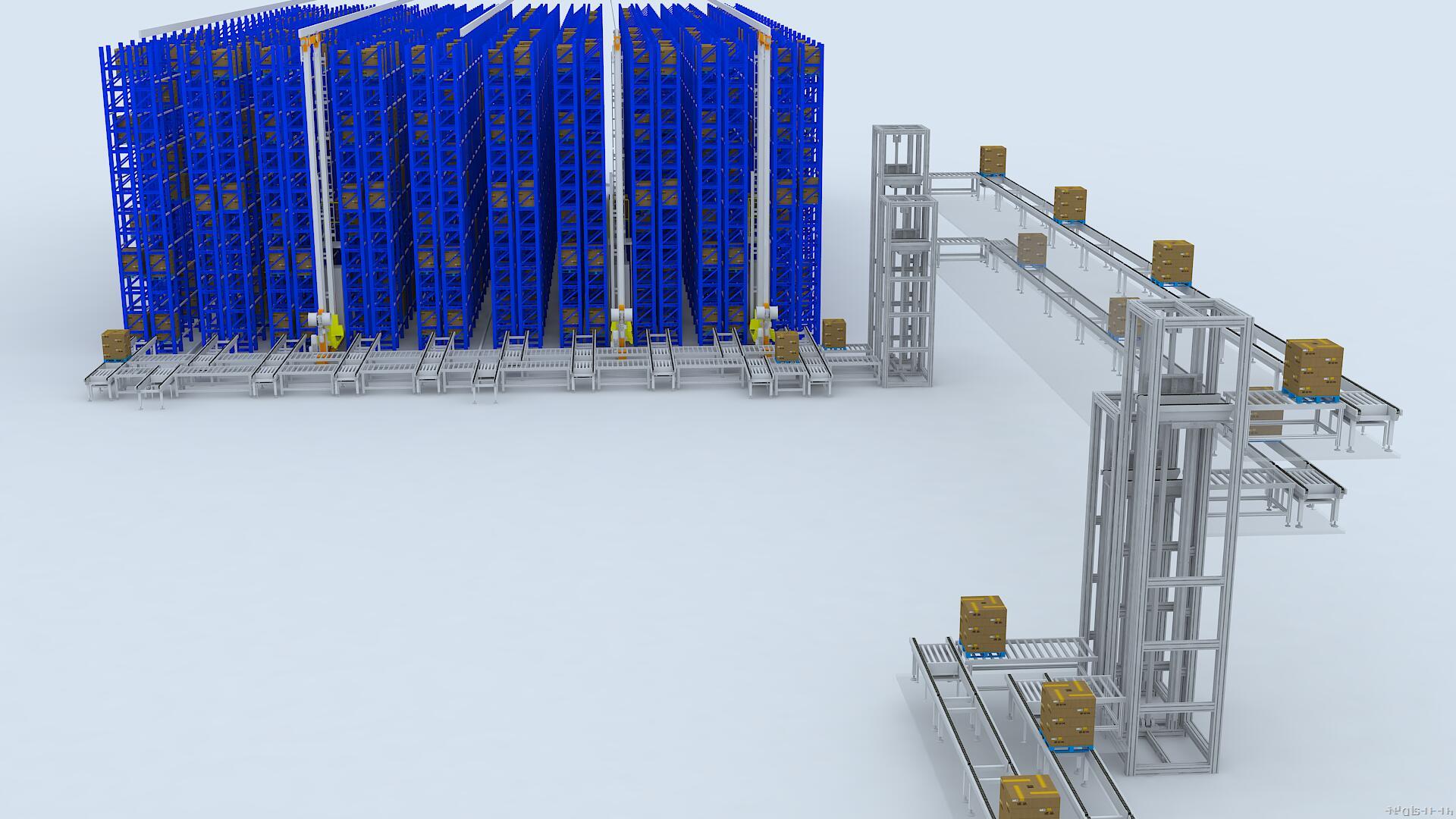
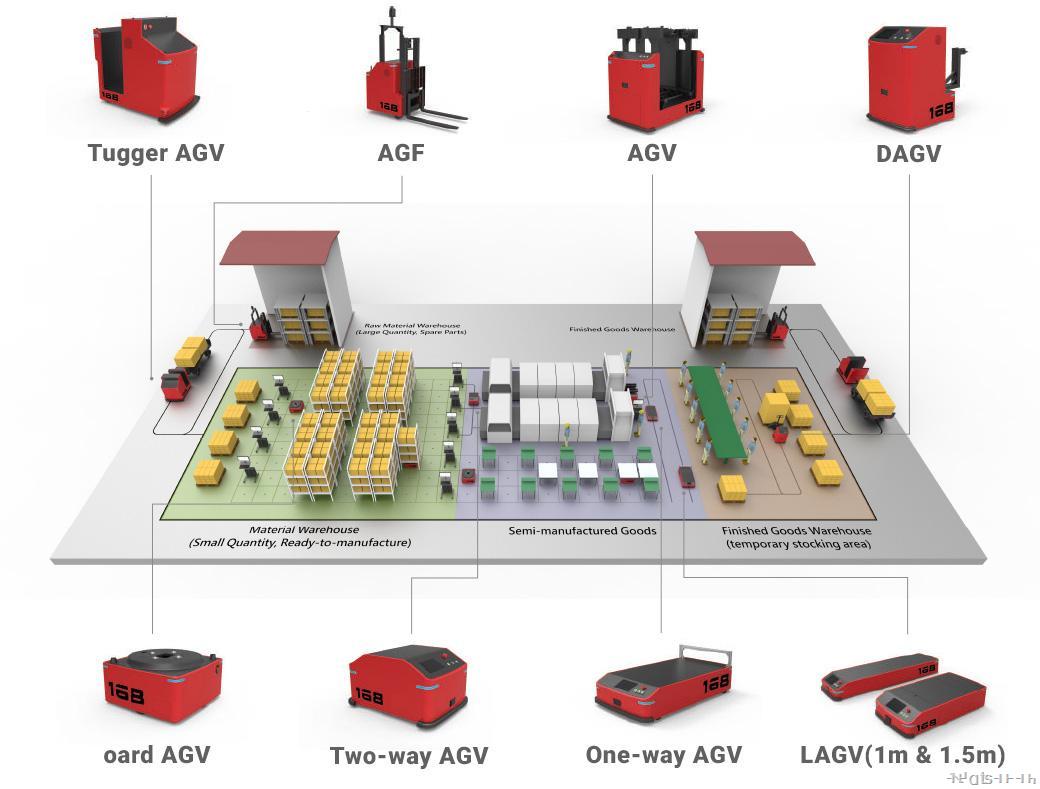
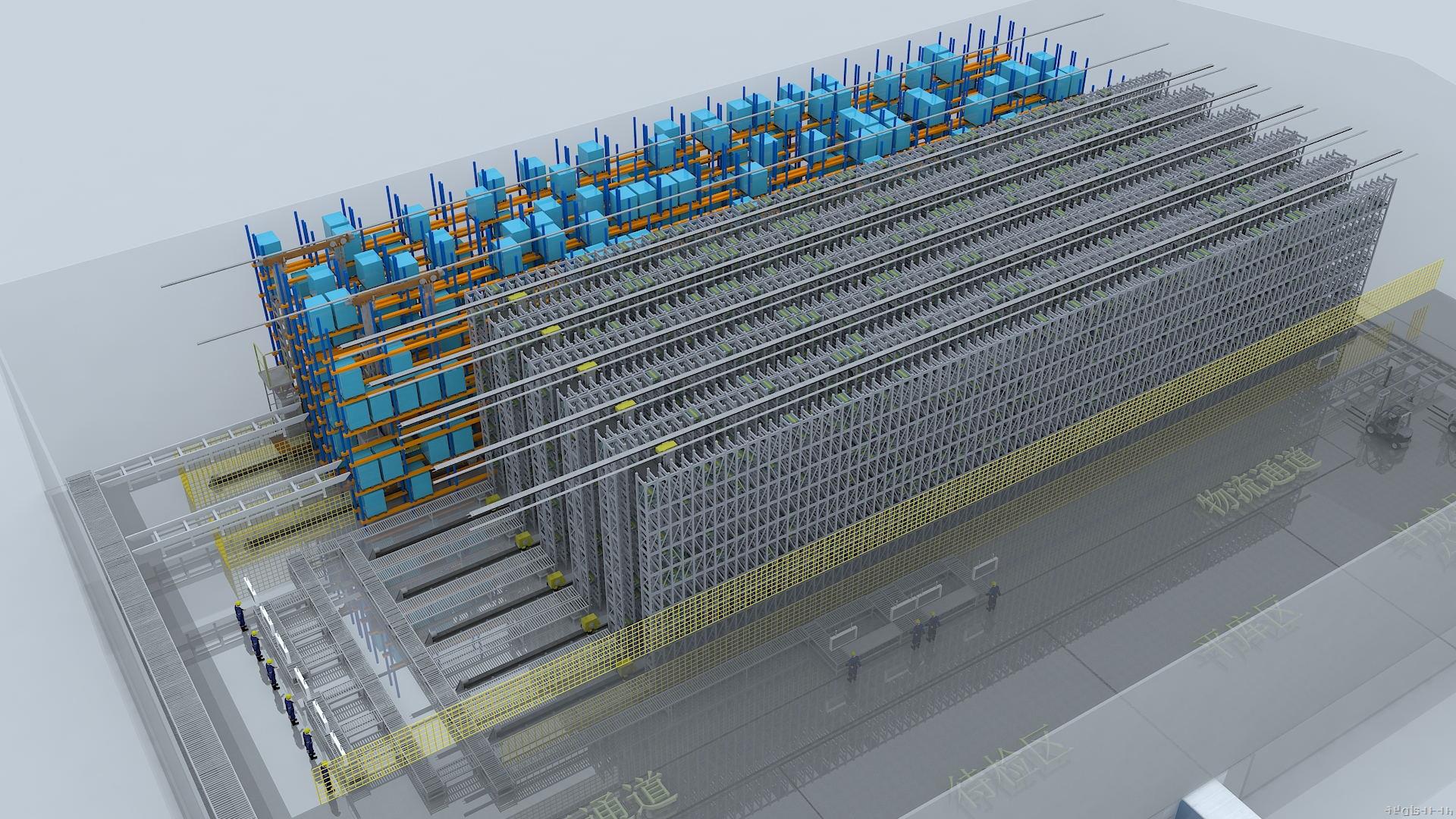
AGVS中央控制系統,是整個物料搬運系統的大腦,通過無線網絡與AGV車輛實現數據交互。負責車輛的任務分配,路徑規劃,系統對接及實時監控,經過對現場的分析看,主要有以下的任務:
A、對AGV的電量進行檢測,并安排AGV與充電站的相互通訊及充電工作;
B、基于AGV車輛管理、交通狀態和運輸指令,可實現高效的運輸流優化;
C、實時收集現場的需求信息,靈活高效的配合產線生產和貨物儲運;
D、AGV運行日志的收集;
E、與MES(或者ERP、WMS等業務系統對接)對接,接受搬運任務,反饋任務執行情況;

● 通過計算選擇到達取貨點行走時間最短的車輛,而不是路程最短的車輛。
● 通過計算偵測路段中是否有車輛作業來避讓擁堵的路段。
● 引入彎道參數,盡量選擇直道。


● 全動態實時顯示AGV系統中各臺AGV小車的工作位置及運行狀態,常用的狀態包括正常狀態、等待充電、充電需求、手動狀態、急停狀態、路徑堵塞、小車丟失、小車停止等。并顯示各作業點、充電點的占用信息。
● 報告AGV系統出現的各種故障,產生事件日志等報表。
● 可根據要求縮放監控界面圖形。
● 查看和設置數據采集系統的輸入和輸出狀態。
● 查看任務命令緩沖區中的任務命令列表,查看AGV小車具體的裝、卸地點。任務命令列表會根據收到的狀態信息不斷更新,可根據要求刪除某一項任務命令或改變任務的某些參數。
● 查看AGV小車的車載控制器的狀態,跟蹤指定的AGV小車,取消不在系統中的AGV小車,釋放多臺AGV小車之間的堵塞。
● 系統具有事件管理功能。可報告各類異常事件,包括AGV小車等待充電時間過長。車輛阻塞時間過長;任務被取消;裝、卸貨站臺號無效或錯誤等。可利用事件過濾器,只顯示所需查詢的事件類型或時間段內發生的事件。
● 特殊情況下可通過圖形監控界面直接下達任務。
上一篇:無
下一篇:無
